Hi! I am a robotics researcher, passionate about shaping a world that's not only more capable, but also more magical 🪄 Currently, I am pursuing a PhD at UIUC (in the 4th year), advised by Professor Justin Yim. Previously, I received M.S. and B.S. (with Great Honor) in Mechanical Engineering from Korea University in 2022 and 2020, respectively.
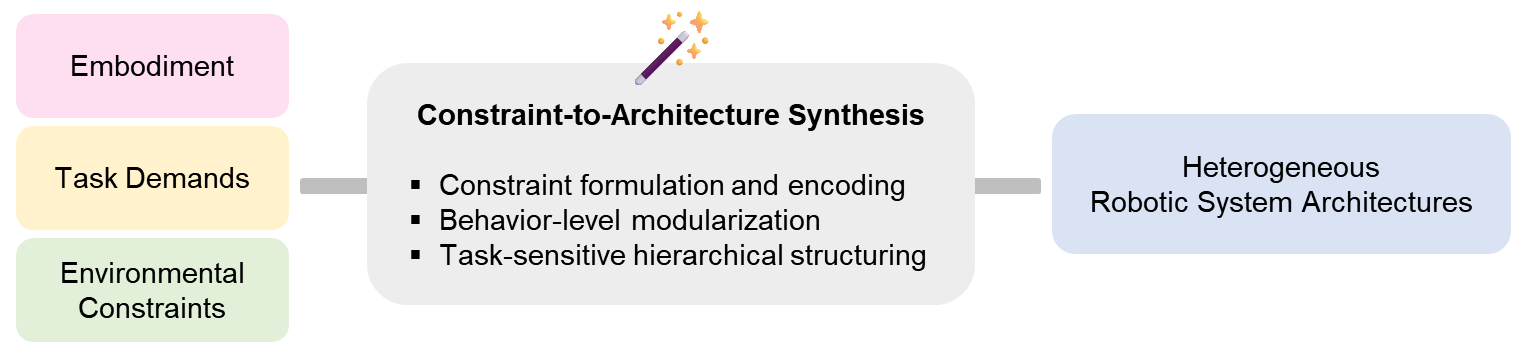
My research focuses on designing motion planning architectures for heterogeneous robotic systems, with an emphasis on how embodiment, task demands, and environmental constraints shape architectural design. Previous and ongoing research projects span domains including human-robot communication; teleoperation- and vision-based manipulation; and unconventional legged and non-legged locomotion (click the cards for details):
🤖 Interactive Head Module
Robotic Head Module for Non-Verbal Communication [ View Project Page ]
A modular 3-DOF robotic head module is developed with a hierarchical system framework that integrates perception, planning, and control in a layered manner.
It enables human–robot interaction through expressive head gestures (i.e., nodding, shaking, and lateral tilting) and vision-based subject tracking.
Furthermore, the system is designed to adapt to arbitrary and dynamic mounting configurations, enhancing its modular deployment capability and
robustness to platform variability.
Keywords:
Social Human-Robot Interaction
Non-Verbal Communication
Vision-Based Interaction
🦾 Superlimb Manipulation
Supernumerary Robotic Limbs for Manipulation Assistance [ View Project Page ]
A dual-layer coordinated motion planning framework is introduced to support daily manipulation tasks using a reconfigurable wearable SRL platform.
The system supports multiple operational modes (i.e., upper-body motion-based teleoperation and vision-based object manipulation)
and accommodates flexible robot configurations through a modular software architecture.
In consideration of the physically coupled human–robot context, an additional planning layer is adopted to generate moment compensation motions
to mitigate asymmetric physical loads transferred to the user.
Keywords:
Physical Human-Robot Interaction
Multi-Limb Coordination
Object Manipulation
Teleoperation
🦮 Grasp-Based Quadruped Locomotion
Grasp-Based Quadruped Locomotion
Details are confidential for now.
This study suggests a generalizable grasp-based locomotion planning framework for diverse quadruped morphologies.
Keywords:
Grasp-Based Quadruped Locomotion
Multi-Limb Coordination
Quadrupedal Locomotion Optimization
❓ Non-Legged Locomotion
Novel Non-Legged Locomotion Paradigm
Details are confidential for now.
This study will suggest a novel locomotion paradigm that addresses the limitations of conventional robots
to enable operation in challenging terrains.
Across the aforementioned domains, the proposed system architectures are grounded in a shared design philosophy: (1) scenario-driven formulation of physical and operational constraints; (2) behavior-level modularization; and (3) task-sensitive hierarchical structuring. Through these implementations, my research offers design-level insights into how motion planning architectures can be structured in response to domain-specific constraints, highlighting recurring patterns across varied deployment scenarios with heterogeneous robotic systems. These principles are further extended to underexplored domains, demonstrating their potential to inform system design in emerging application areas.
Beyond motion planning architectures, my background also includes mechanism design (click the cards for details).
⚙️ Mechanism Design
🏋🏻 Exoskeleton Design
A lower-back exoskeleton with a four-bar linkage structure for providing extensor moment and lumbar traction force
Chaerim Moon, Jangho Bae, Jaewon Kwak, and Daehie Hong
IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022
Keywords:
Kinematic Synthesis
Wearable Robotics
Calculation of reduced back moments with a back support exoskeleton
Chaerim Moon and Daehie Hong
International Symposium on Precision Engineering and Sustainable Manufacturing, 2021
Keywords:
Biomechanics
System Modelling
🚚 AGV Design
Design of a double-scissor lift for heavy-duty automated guided vehicles
Chaerim Moon, Oh Young Kwon, Jaemyung Huh, and Daehie Hong
KSPE 2021 Spring Conference, 2021
Keywords:
Mechanism Design
Industrial Robotics
👷🏻♂️ Superlimb Design
Biomechanical design and control of supernumerary robotic arms for enhancing the ladder work safety
Chaerim Moon and Daehie Hong
International Symposium on Precision Engineering and Sustainable Manufacturing, 2020
Keywords:
Biomechanics
System Modelling
Biomechanical design criteria of extra robotic upper limbs for construction workers
Chaerim Moon and Daehie Hong
KSPE 2020 Conference, 2020
Keywords:
Biomechanics
Ergonomics
Outside of research, I enjoy:
🎻 Playing the violin in the UIUC Philharmonia Orchestra
🧗🏼♀️ Working through bouldering problems at local climbing gyms
— pursuits that challenge me to stay focused, adaptable, and in sync with complex systems.
