Chaerim (Wendy) Moon
PhD Candidate · Mechanical Science and Engineering · UIUC

I am a fourth-year PhD candidate, advised by Professor Justin Yim. Previously, I received M.S. and B.S. (with Great Honor) in Mechanical Engineering from Korea University in 2022 and 2020, respectively.
Research Keywords: 🧠 physics-aware motion generation · ⚙️ whole-body dynamics · 🐕 multi-limb coordination
My research focuses on constraint-aware motion design for multi-limb robotic systems. I study how to design coordinated motions for multi-limb robots under physical constraints imposed by robot morphology and dynamics, operating environments, and even human users. My broader goal is to establish motion design principles that enable multi-limb robots to operate effectively in underexplored but impactful applications.
news
| Jun 11, 2026 | I will attend 2026 Midwest Robotics Workshop to present my work on motion design in microgravity. |
|---|---|
| Jan 10, 2026 | I am co-organizing “3rd Unconventional Robots: From Concept to Real-World Systems”, a workshop at ICRA 2026. |
| Sep 04, 2025 | I passed my preliminary exam with the dissertation proposal titled “Constraint-Driven Motion Planning Architectures for Heterogeneous Robotic Systems” 🎉 |
selected publications
- Under Review
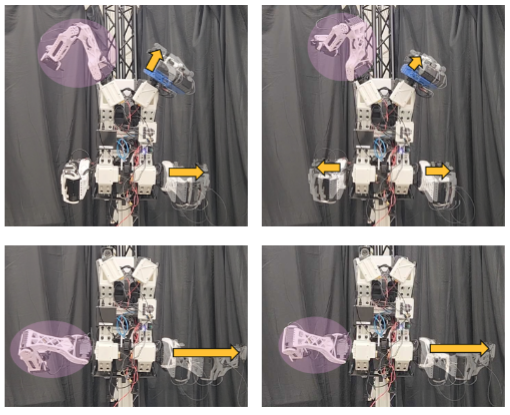
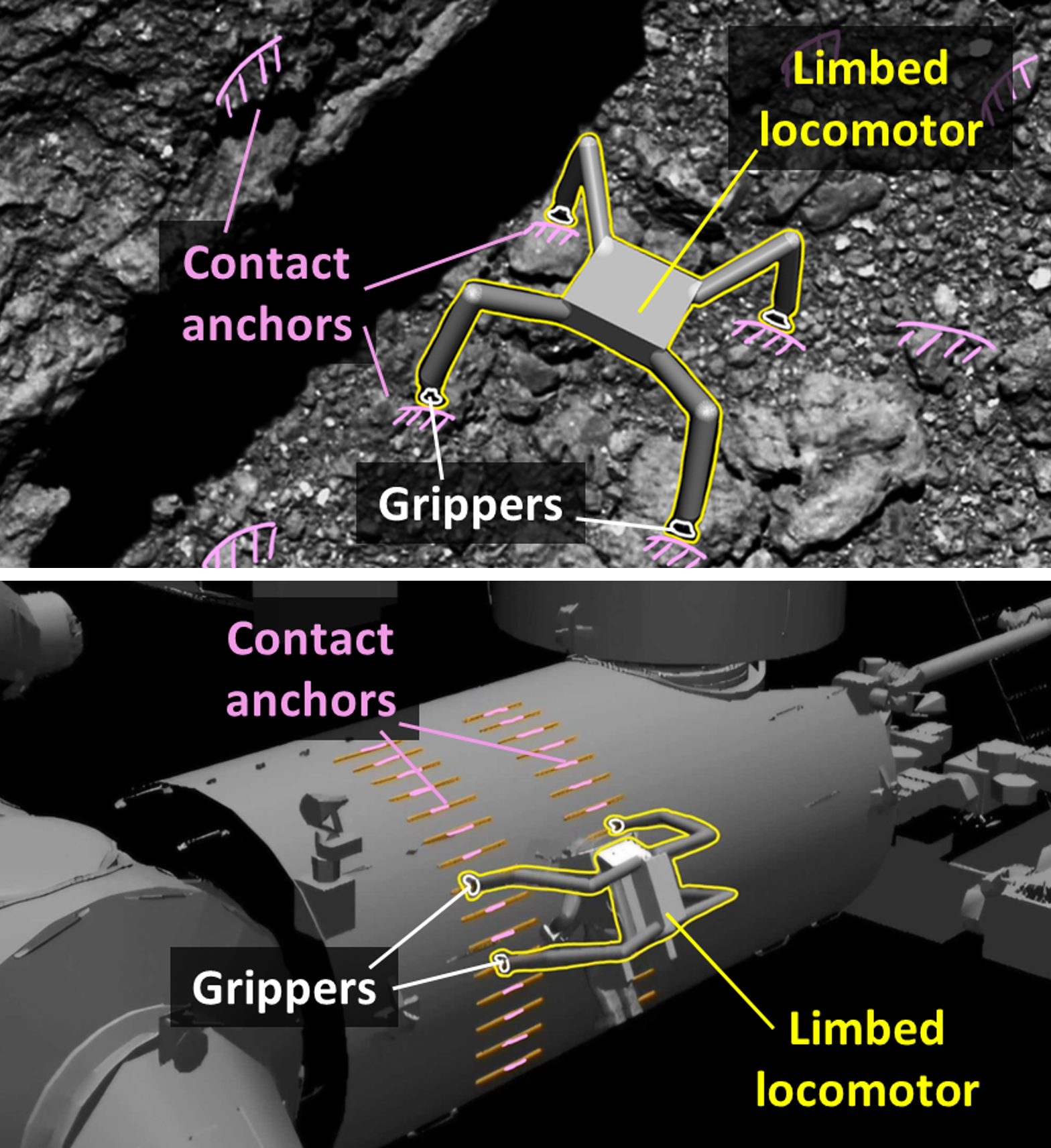 Motion Design for Grasp-Based Dynamic Locomotion in MicrogravityUnder Review, 2026
Motion Design for Grasp-Based Dynamic Locomotion in MicrogravityUnder Review, 2026 - RO-MAN
 Strategies for Moment Compensation in Supernumerary Robotic Limbs Manipulation TasksIn IEEE RO-MAN, 2024
Strategies for Moment Compensation in Supernumerary Robotic Limbs Manipulation TasksIn IEEE RO-MAN, 2024 - RO-MAN
 Development of a 3-DOF Interactive Modular Robot with Human-like Head MotionsIn IEEE RO-MAN, 2023
Development of a 3-DOF Interactive Modular Robot with Human-like Head MotionsIn IEEE RO-MAN, 2023 - TNSRE
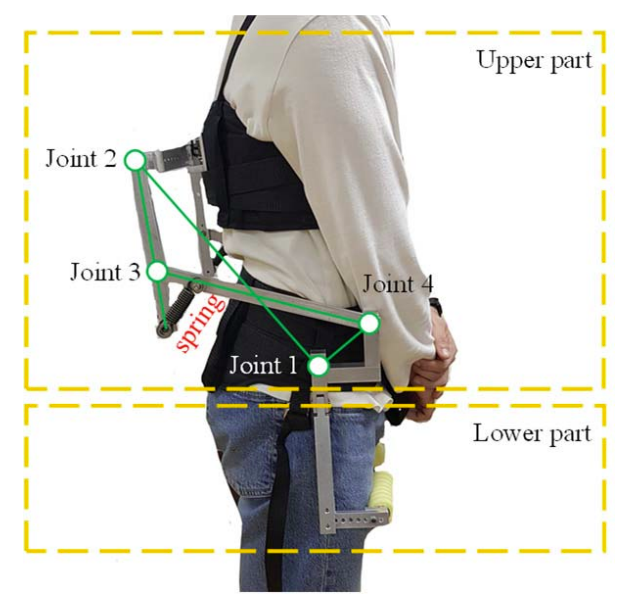 A Lower-Back Exoskeleton with a Four-Bar Linkage Structure for Providing Extensor Moment and Lumbar Traction ForceIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022
A Lower-Back Exoskeleton with a Four-Bar Linkage Structure for Providing Extensor Moment and Lumbar Traction ForceIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022