publications
1. Multi-Limb Locomotion
- Under Review
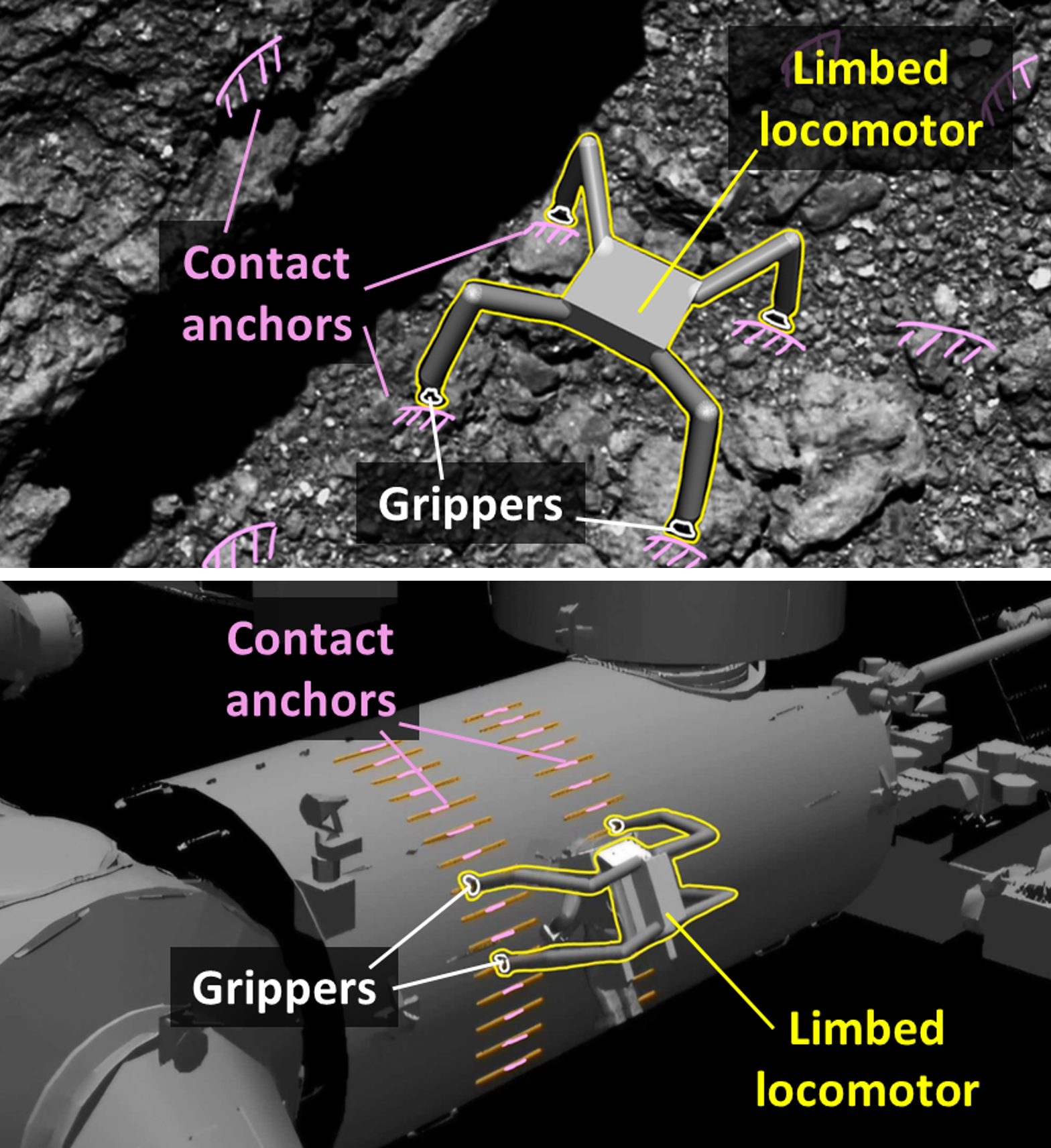 Motion Design for Grasp-Based Dynamic Locomotion in MicrogravityUnder Review, 2026
Motion Design for Grasp-Based Dynamic Locomotion in MicrogravityUnder Review, 2026
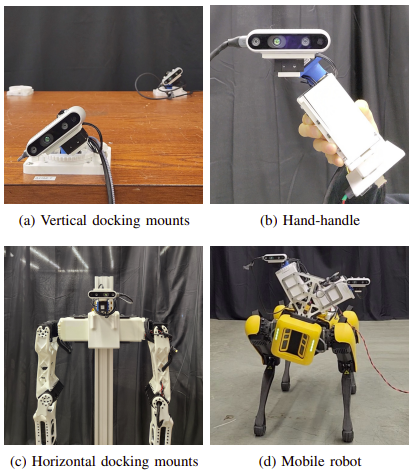
2. Multi-Limb Manipulation
- RO-MAN
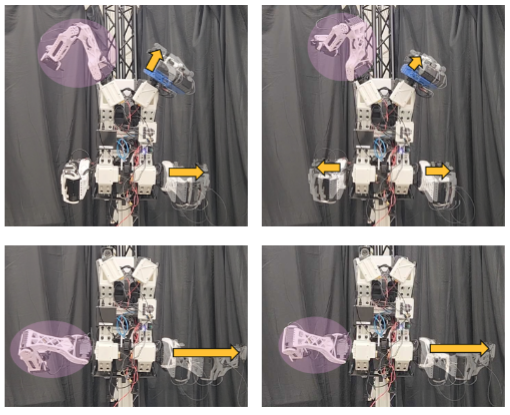 Strategies for Moment Compensation in Supernumerary Robotic Limbs Manipulation TasksIn IEEE RO-MAN, 2024
Strategies for Moment Compensation in Supernumerary Robotic Limbs Manipulation TasksIn IEEE RO-MAN, 2024 - EMBC
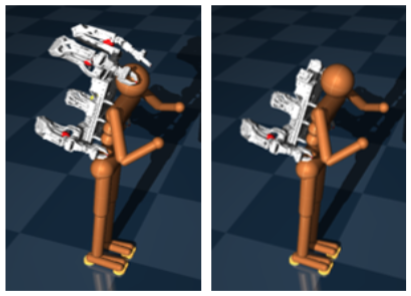 Assessing the Physical Impact of Supernumerary Limbs on a Human Subject: A Simulation StudyIn IEEE EMBC, 2024
Assessing the Physical Impact of Supernumerary Limbs on a Human Subject: A Simulation StudyIn IEEE EMBC, 2024 - IROS Workshop
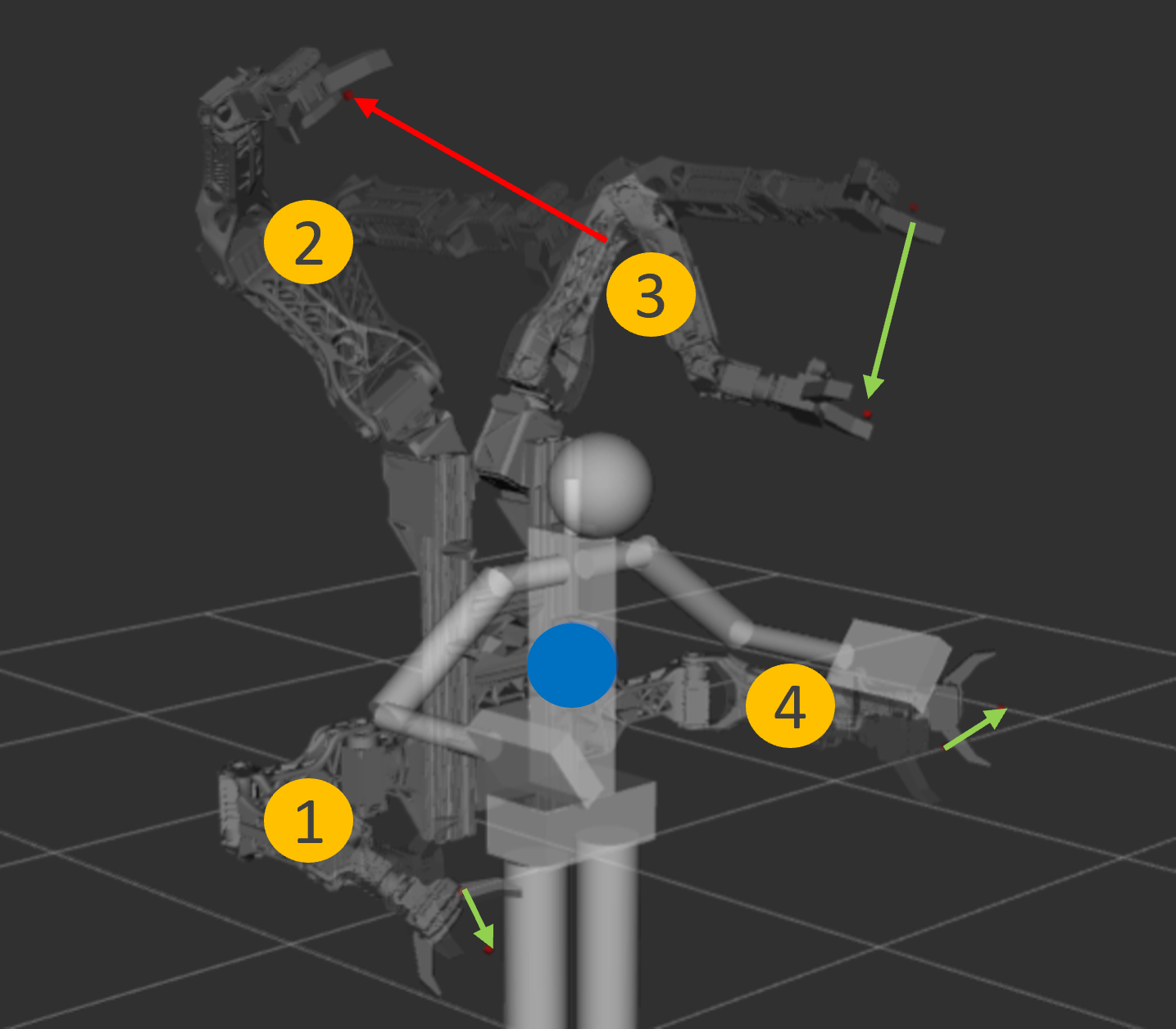 Coordinated Motion Planning of a Wearable Multi-Limb System for Enhanced Human-Robot InteractionIn Workshop on Multilimb Coordination in Human Neuroscience and Robotics: Classical and Learning Perspectives at IROS, 2023
Coordinated Motion Planning of a Wearable Multi-Limb System for Enhanced Human-Robot InteractionIn Workshop on Multilimb Coordination in Human Neuroscience and Robotics: Classical and Learning Perspectives at IROS, 2023 - IROS Demo
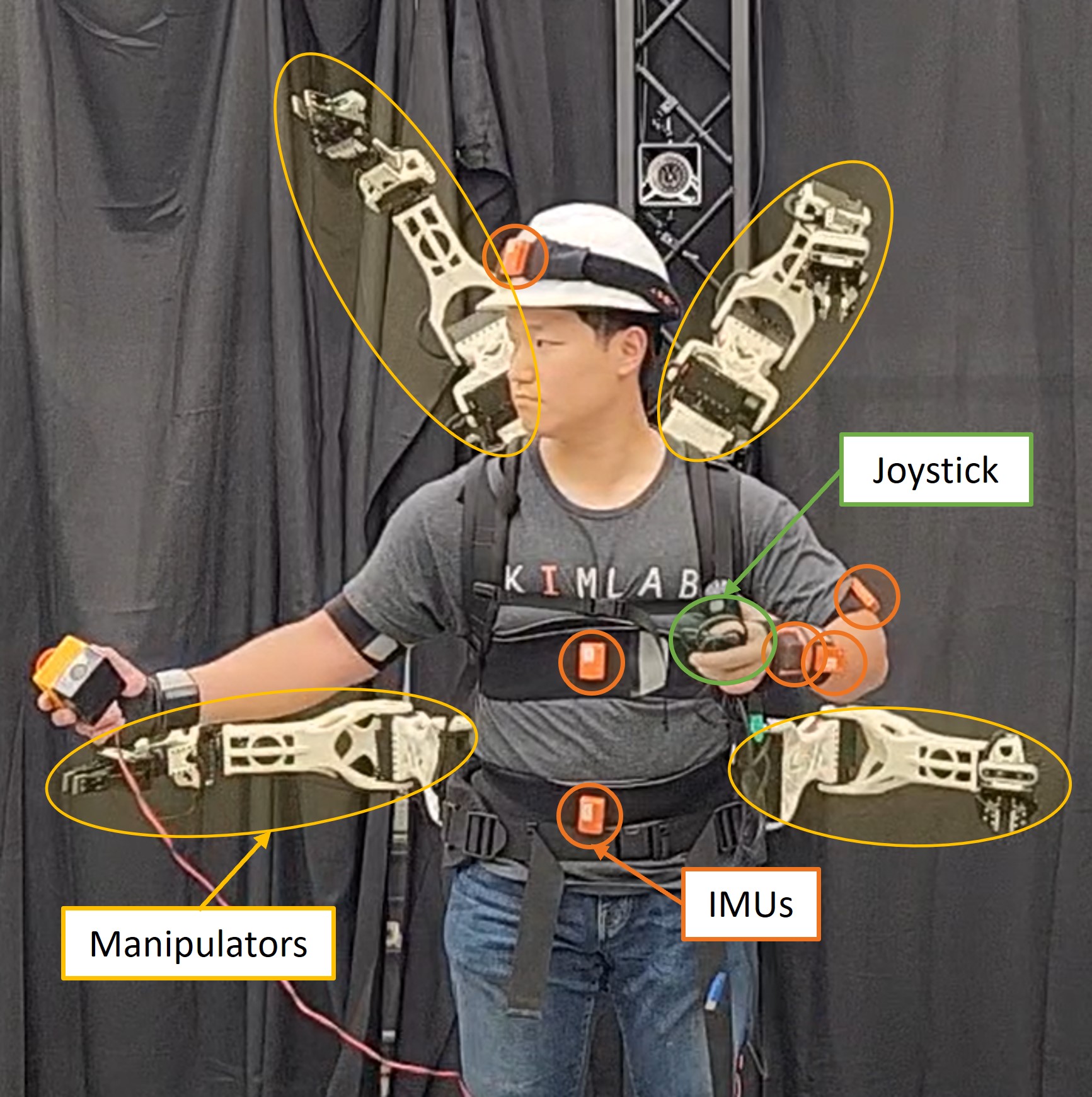 Robotic Backpack System with Pluggable Supernumerary LimbsIn Demo Session at IROS, 2023*Equal contribution
Robotic Backpack System with Pluggable Supernumerary LimbsIn Demo Session at IROS, 2023*Equal contribution
3. Interactive Head Robot
- RO-MAN
 Development of a 3-DOF Interactive Modular Robot with Human-like Head MotionsIn IEEE RO-MAN, 2023
Development of a 3-DOF Interactive Modular Robot with Human-like Head MotionsIn IEEE RO-MAN, 2023
4. Passive Exoskeleton
- TNSRE
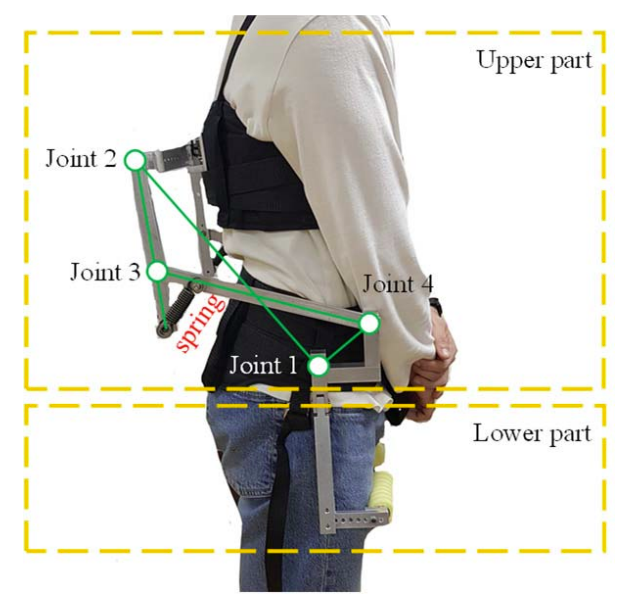 A Lower-Back Exoskeleton with a Four-Bar Linkage Structure for Providing Extensor Moment and Lumbar Traction ForceIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022
A Lower-Back Exoskeleton with a Four-Bar Linkage Structure for Providing Extensor Moment and Lumbar Traction ForceIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022