Motion Design for Grasp-Based Dynamic Locomotion in Microgravity
grasp-based locomotion
Abstract
Locomotion in microgravity often relies on sparsely and irregularly arranged anchors, motivating grasp-based mobility with multiple limbs. In this setting, dynamic locomotion is feasible only through deliberate regulation of both anchored interactions and whole-body coordination under coupled dynamic and kinematic constraints. This paper presents design insights for grasp-based dynamic locomotion with multi-limbed robotic systems in microgravity, targeting scenarios that require 6D limb manipulation to establish contacts with candidate anchors. The investigated design parameters include gait pattern, stride length, locomotion speed, and nominal posture. A parameterizable locomotion planning framework is proposed to support variations of these parameters and to evaluate the resulting locomotion performance in terms of stability and actuation demand. Two representative quadruped morphologies are adopted for evaluation in physics-based simulation. The results demonstrate that enlarging the feasible contact wrench space and attenuating impulsive whole-body dynamics improve locomotion performance. These findings inform strategies for contact configuration selection and whole-body coordination in microgravity locomotion with multi-limbed systems.
Selected Publications
Locomotion Design Constraints
Without gravity, common terrestrial locomotion assumptions, such as support-polygon stability criteria and pendulum-based walking templates, are no longer directly applicable. Microgravity locomotion therefore requires a new definition of feasibility based on anchored contact interactions.
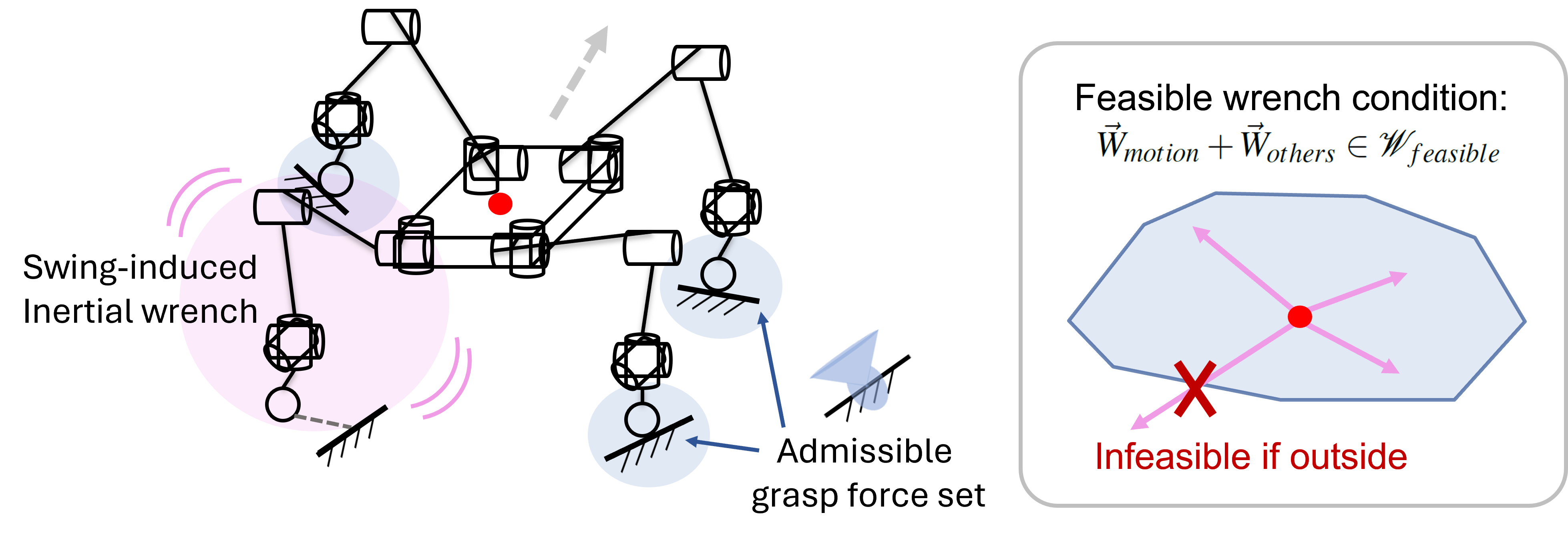
Dynamically, motion-induced and external wrenches must remain within the feasible contact wrench space.
Kinematically, anchor-to-anchor transitions require a sequence of reachable 6D grasp poses.
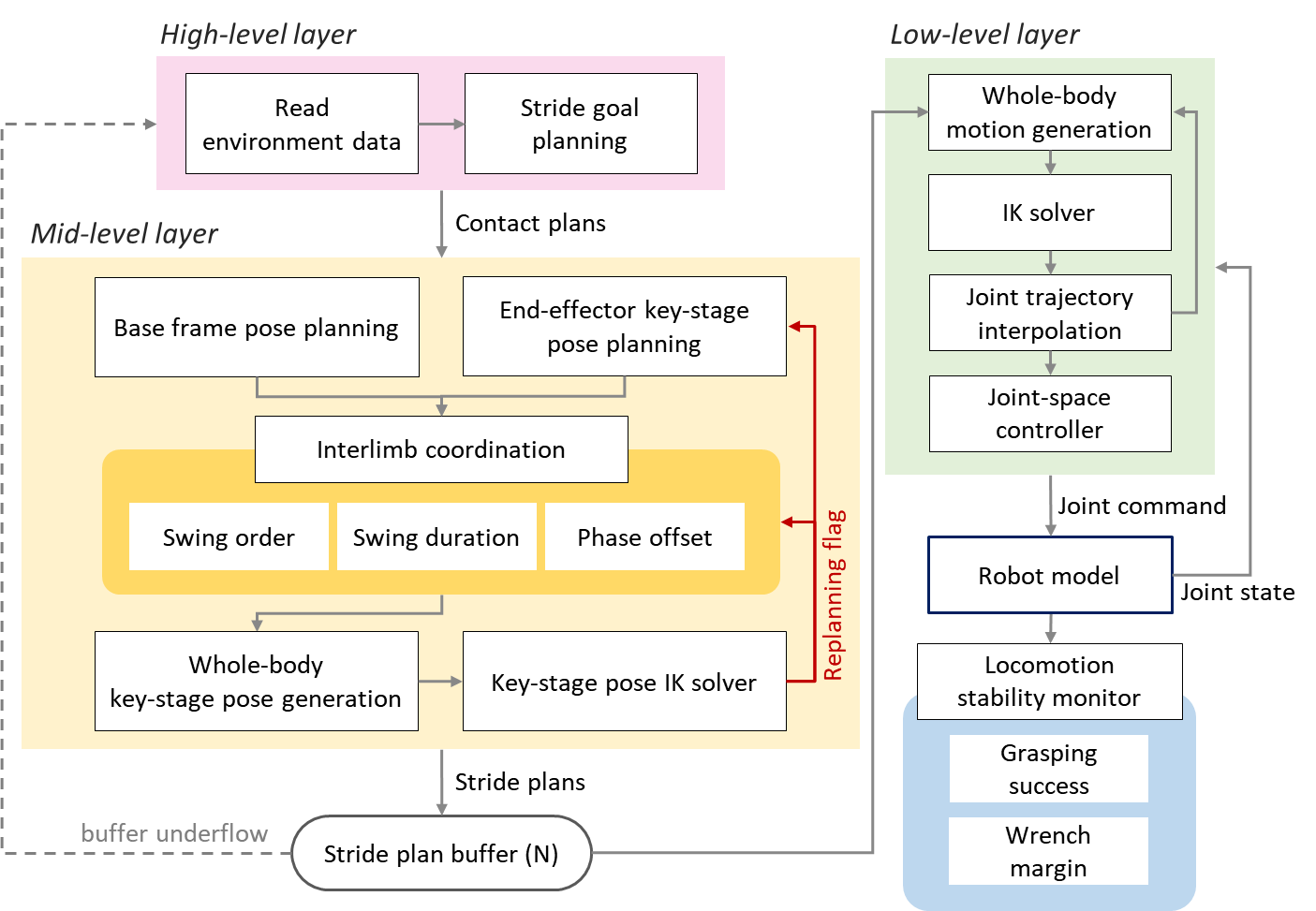
Parameterizable Locomotion Planning Framework
This framework generates coordinated whole-body locomotion plans while supporting systematic variations in gait parameters, robot models, and environment models.
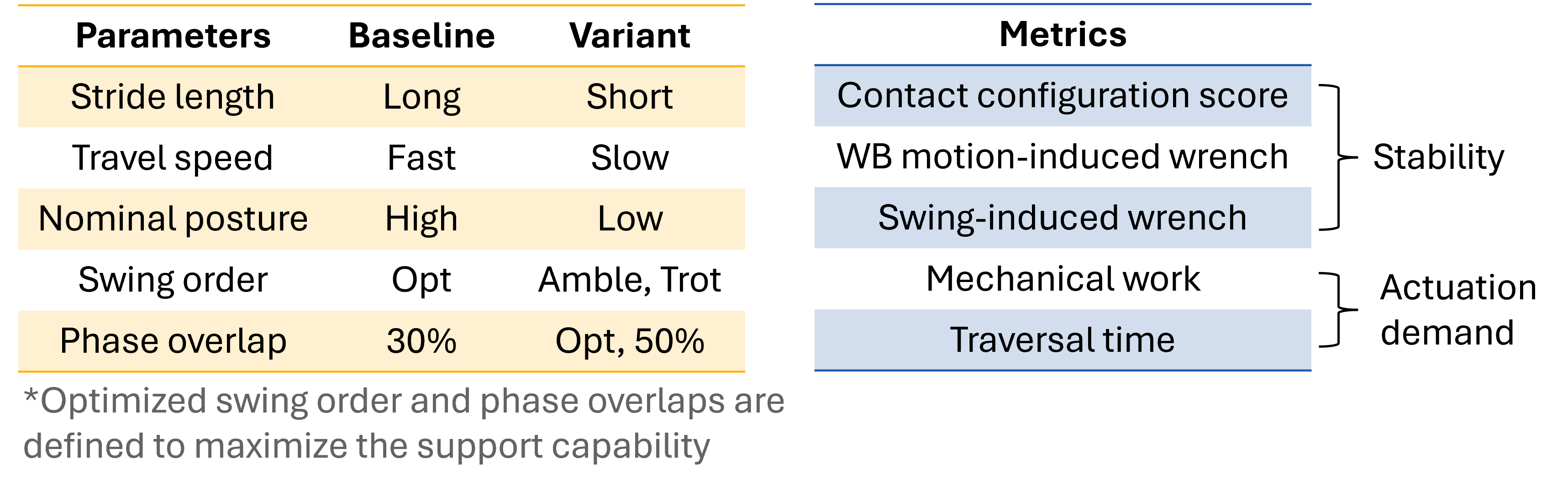
Gait Parameters and Evaluation Metrics
A physics-based simulation study is conducted in MuJoCo to investigate the correlation between parameters of interest and dynamic locomotion performance in the target scenario.
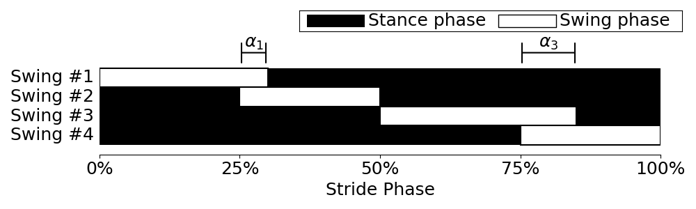
Given the selected gait parameters, locomotion is characterized as illustrated in the Hildebrand diagram.
Gait Parameter Exploration
Conclusion
This study advances the understanding of grasp-based dynamic locomotion in microgravity, where robots interact with sparsely and irregularly distributed contact anchors while satisfying full 6D end-effector pose constraints. The results show that improved locomotion performance is most consistently achieved by selecting contact sets that enlarge the feasible contact wrench space and by coordinating limb motions to limit motion-induced wrenches. These findings provide a principled basis for designing robust and efficient grasp-based locomotion strategies in microgravity.
BibTeX
@misc{moon2026motiondesigngraspbaseddynamic,
title={Motion Design for Grasp-Based Dynamic Locomotion in Microgravity},
author={Chaerim Moon and Joohyung Kim and Justin K. Yim},
year={2026},
eprint={2605.21704},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2605.21704},