Supernumerary Robotic Limb System for Daily Manipulation Task Assistance
multi-limb manipulation
Abstract
With growing interest in augmenting human capabilities, Supernumerary Robotic Limbs (SRLs) have been introduced to provide users with additional limbs for performing tasks that exceed the capabilities of natural human limbs. To effectively support human users, these systems are required to generate motions that are transparent and well-coordinated with the user. In addition, the wearable nature of SRLs introduces the need to consider the physical loads transferred from the robot’s motions to the user’s body.
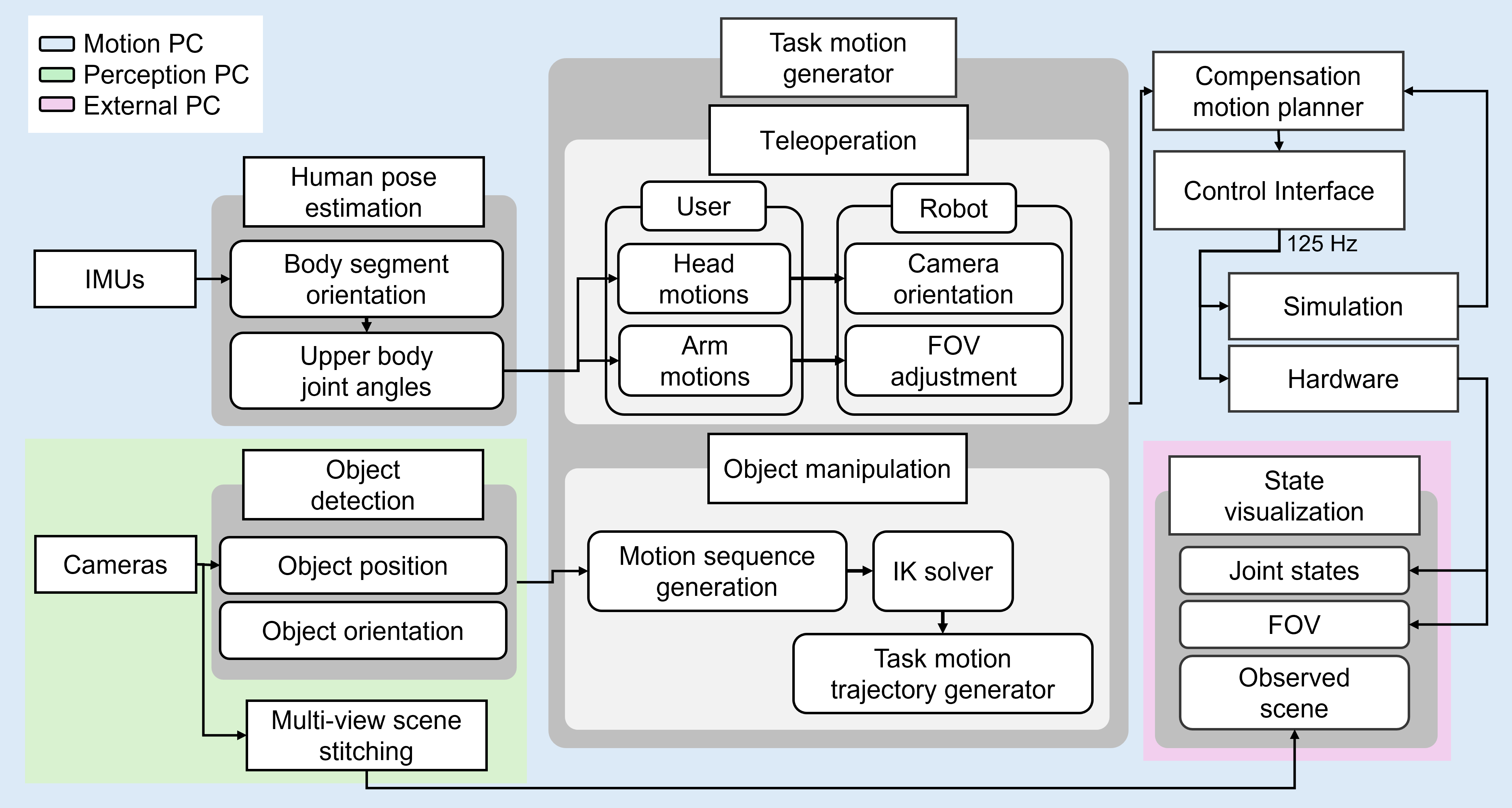
This study presents a system framework designed to enable SRLs to assist users in daily manipulation tasks. The software architecture is designed to accommodate variations in hardware configuration, operational modes, and task requirements. To support operational mode flexibility, the system can selectively activate different perception-planning pipelines depending on the selected mode, including teleoperation and vision-based manipulation. Beyond task execution, the system includes an additional planning layer, which generates moment-compensating motions to mitigate the physical loads transmitted from the robot to the user. The proposed framework is validated through both simulation and hardware experiments.
Selected Publications
Chaerim Moon and Joohyung Kim
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), August 2024
Chaerim Moon and Joohyung Kim
Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), July 2024
Chaerim Moon and Joohyung Kim
Workshop presentation, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 2023
Chaerim Moon, Sean Taylor, Kevin Gim, Sankalp Yamsani, Kazuki Shin, Kyungseo Park, and Joohyung Kim
Demo Session, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 2023
Motion Planning Framework
A coordinated motion planning pipeline for SRLs is developed to accomplish varied task objectives while attenuating the possible physical burdens on the human user. The motions of each robotic limb can be classified as task or compensation motions, namely tasker and compensator motions. For task motions, two operation modes are developed: teleoperation and vision-based manipulation. The compensation motion is planned for the idle robotic limbs to reduce the asymmetric moments applied to the user, without interfering with the primary task.
Reconfigurable Hardware
The hardware can accommodate up to four robotic limbs, allowing arbitrary docking mount combinations to suit different operational needs.
Object Manipulation Mode
The vision-based mode enables the robotic system to adopt a level of autonomy by leveraging visual perception to grasp and bring an object to the user. Each mode is designed to generate joint-space trajectories for a tasker.
Teleoperation Mode
The teleoperation mode enables explicit control of the robotic system based on the user's upper body pose, which is estimated in real time by exploiting seven sparse IMUs, namely Xsens MTw Awinda sensors.
BibTeX
@INPROCEEDINGS{10731227,
author={Moon, Chaerim and Kim, Joohyung},
booktitle={2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN)},
title={Strategies for Moment Compensation in Supernumerary Robotic Limbs Manipulation Tasks},
year={2024},
volume={},
number={},
pages={491-496},
keywords={Robot kinematics;Simulation;Human-robot interaction;Hardware;Real-time systems;Trajectory;Collision avoidance},
doi={10.1109/RO-MAN60168.2024.10731227}
}@INPROCEEDINGS{10781831,
author={Moon, Chaerim and Kim, Joohyung},
booktitle={2024 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC)},
title={Assessing the Physical Impact of Supernumerary Limbs on a Human Subject: A Simulation Study},
year={2024},
volume={},
number={},
pages={1-4},
keywords={Robot motion;Torque;Dynamics;Human in the loop;Engineering in medicine and biology;Robots;Injuries;Gravity;Physical Human-Robot Interaction;Wearable Robotics;Human Factors and Human-in-the-Loop},
doi={10.1109/EMBC53108.2024.10781831}
}